DeepLab 笔记
一、背景
DCNN 存在的问题:
- 多次下采样使输出信号分辨率变小 —— 空洞卷积
- 池化对输入变换具有内在空间不变性 —— CRF
二、空洞卷积
1. 作用
- 保证感受野不发生变化
- 得到密集的 feature map
2. 卷积核
\[new\_kernel = kernel + \left(kernel - 1 \right) \times \left( dilation - 1\right)\]3. 输出大小
\[output = \left \lfloor \frac{in - kernel - \left( kernel -1\right) \times \left( dilation -1 \right) +2\times padding}{stride} \right \rfloor + 1\]4. 感受野
\[RF_{l} = RF_{l-1} + \left( kernel\_size_{l} - 1\right) \times feature\_stride_{l-1} \times dilation_{l}\]三、条件随机场(CRF)
作用:精细化边缘信息
DeepLab 后面接了一个全连接条件随机场 (Fully-Connected Conditional Random Fields) 对分割边界进行 refine label map。CRF 经常用于 pixel-wise 的 label 预测。把像素的 label 作为随机变量,像素与像素间的关系作为边,即构成了一个条件随机场且能够获得全局观测时,CRF 便可以对这些 label 进行建模。全局观测通常就是输入图像。
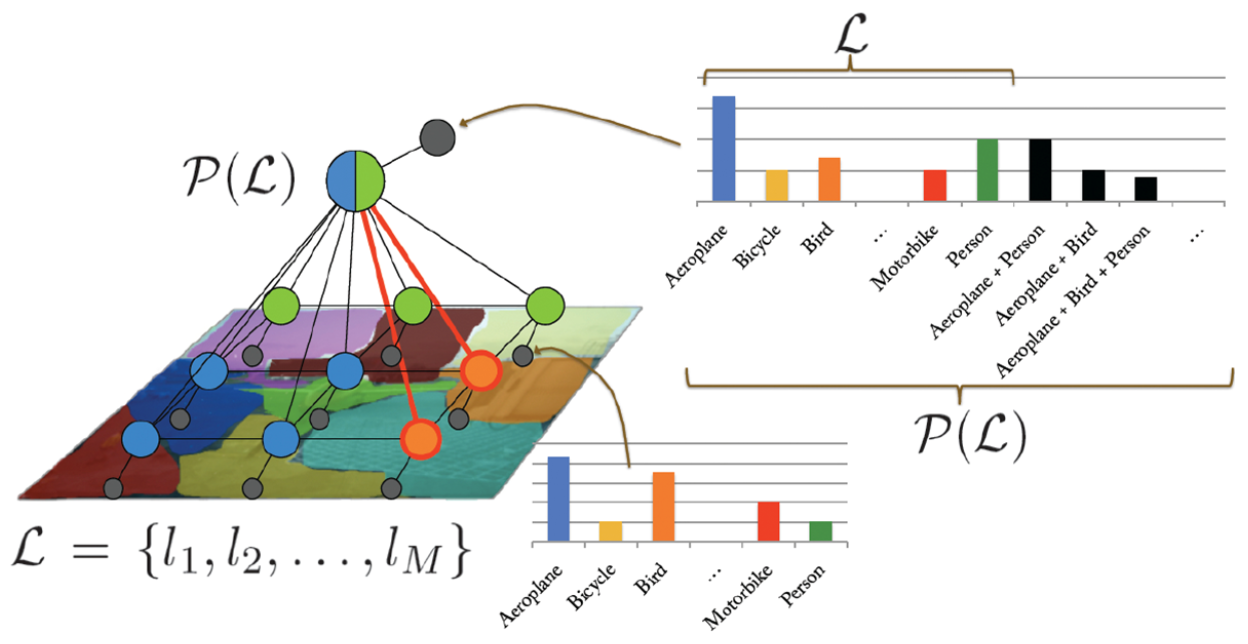
令随机变量 $X_{i}$ 是像素 i 的标签,$X_{i} \in L = l_{1},l_{2},\cdots,l_{L}$,令变量 $X$ 是由 $X_{1},X_{2},\cdots,X_{N}$ 组成的随机向量,N 就是图像的像素个数。
假设图 $G = \left(V,E\right)$,其中 $V = X_{1},X_{2},\cdots,X_{N}$,全局观测为$I$。条件随机场符合吉布斯分布,$\left(I,X\right)$ 可以被模型为 CRF,
\[P \left(X = x \vert I\right) = \frac{1}{Z \left(I\right) \exp \left(-E \left(x \vert I\right)\right)}\]在全连接的CRF模型中,标签 x 的能量可以表示为:
\[E\left(x\right)=\sum_{i} \theta \left(x_{i}\right) + \sum_{ij} \theta_{i} j\left(x_{i},x_{j}\right)\]其中,$\theta_{i}\left(x_{i}\right)$ 是一元能量项,代表着将像素 i 分成 label $x_{i}$ 的能量,二元能量项 $\varphi_{p} \left(x_{i},x_{j}\right)$ 是对像素点 i, j 同时分割成 $x_{i},x_{j}$ 的能量。二元能量项表述像素点与像素点之间的关系,鼓励相似像素分配相同的标签,而相差较大的像素分配不同的标签,而这个“距离”的定义与颜色值和实际相对距离有关。所以这样 CRF 能够使图片尽量在边界处分割。最小化上面的能量就可以找到最有可能的分割。而全连接条件随机场的不同就在于,二元势函数描述的是每一个像素与其他所有像素的关系,所以叫“全连接”。具体来说,在 DeepLab 中一元能量项直接来自于前端 FCN 的输出,计算方式如下:
\[\theta_{i} \left(x_{i}\right) = -\log P\left(x_{i}\right)\]而二元能量项的计算方式如下:
\[\theta_{i}j\left ( x_{i},x_{j} \right ) = \mu j\left ( x_{i},x_{j} \right )\left [ \omega_{1} \exp \left ( -\frac{\left \Vert p_{i} - p_{j} \right \Vert^{2}}{2 \sigma_{\alpha}^{2}} -\frac{\left \Vert I_{i} - I_{j} \right \Vert^{2}}{2 \sigma_{\beta}^{2}}\right ) + \omega_{2} \exp \left ( -\frac{\left \Vert p_{i} - p_{j} \right \Vert^{2}}{2 \sigma _{\gamma}^{2}} \right ) \right ]\]其中,$\mu \left ( x_{i},x_{j} \right ) = 1$, 当 $i \neq j$ 时,其他的值为0。也就是说当标签不同是,才有惩罚。剩余表达式是在不同特征空间的两个高斯核函数,第一个基于双边高斯函数基于像素位置 p 和 RGB 值 I,强制相似 RGB 和超参数 $\sigma_{\alpha},\sigma_{\beta},\sigma _{\gamma}$ 控制高斯核函数的权重。
四、语义分割的常见结构
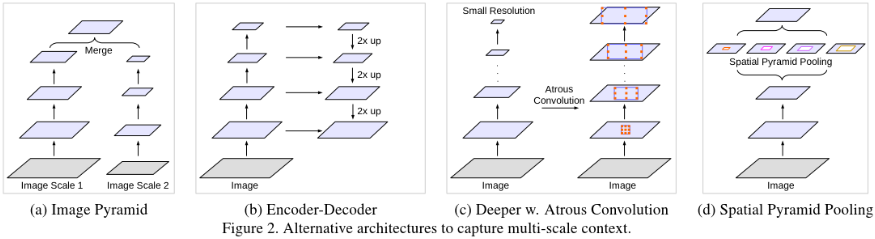
1. Image Pyramid
应用于多尺寸输入,来自小尺寸的特征响应可以编码远距离的上下文信息。较大尺寸的输入图片可以包含更多的物体细节信息。将不同尺寸的图片输入DCNN,并融合所有尺寸的feature maps。这种结构的缺点是对于较深的DCNN由于GPU的限制并不能对输入图片进行很好的scale操作。
2. Encoder-Decoder
可以获得锋利的边界,主要包含两部分:
- 编码层feature map的空间维度降低很多,更长距离的信息在更深的编码层中更容易被捕捉到。
- 解码层的物体细节和空间维度逐渐恢复。应用反卷积将低分辨率的feature map进行上采样。SegNet重新利用编码层中max-pooling 的 indices 和添加的卷积层来细化得到的特征。UNet是将对应层的特征信息进行拼接,并重新构造了网络。
3. Context Module
此模块包含额外的级联的模型,用于编码长距离下的语义信息。比如 Dense CRF 接到 DCNN 的后面,在 DCNN 最后一层增加几层卷积,使 CRF 和 DCNN 可以联合训练。目前,有一种普适性与稀疏性的高卷积,结合高斯条件随机场来进行分割。
4. Spatial Pyramid Pooling:
空间金字塔池化,可以池化不同分辨率的特征图来捕获丰富的上下文信息。
五、DeepLab V1
1. 关键技术
- dilation convolution
- CRF
2. 网络结构
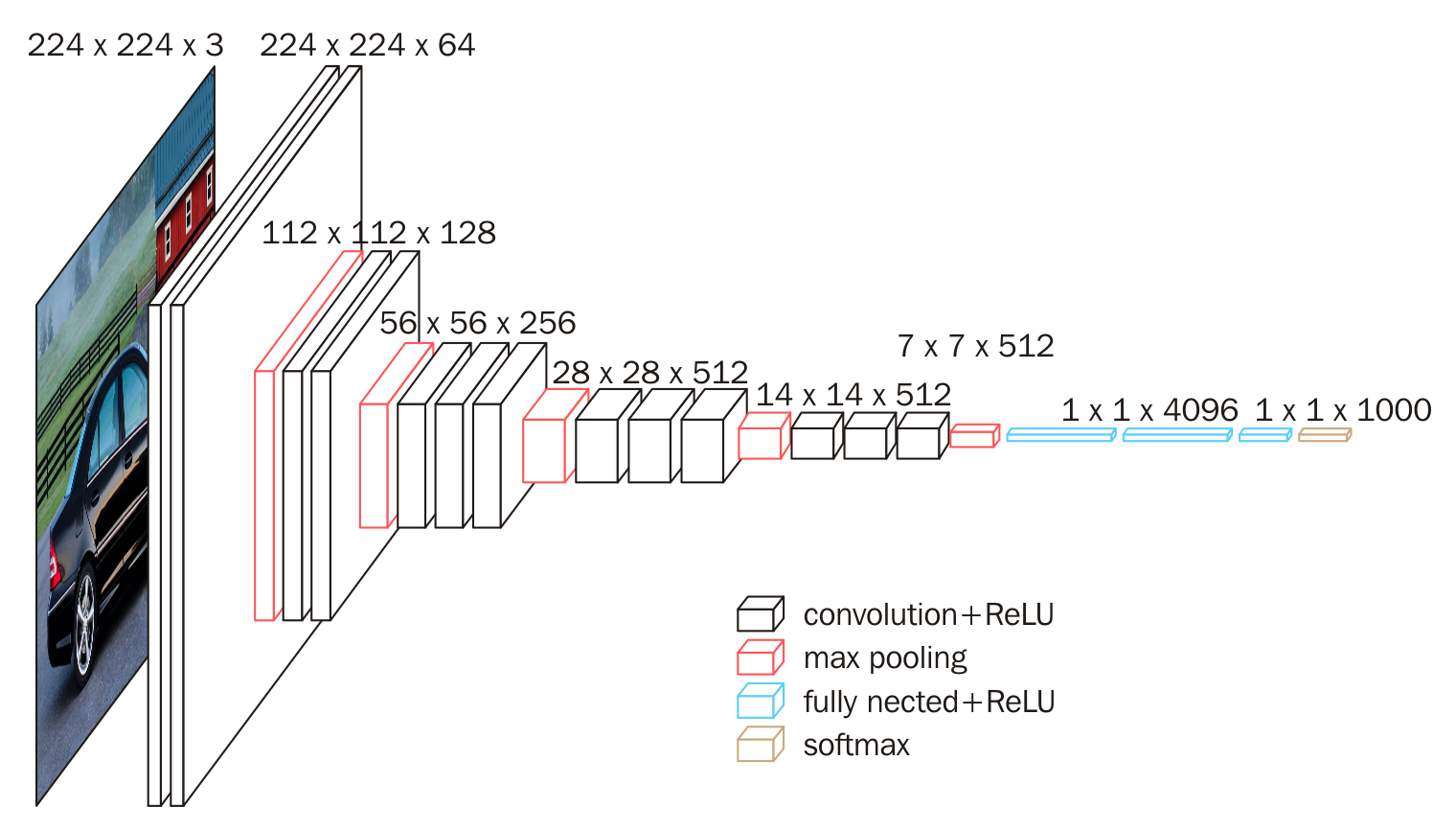
上图为 VGG16 网络,DeepLab v1 在此网络上修改。
-
全连接层替换为卷积层;
-
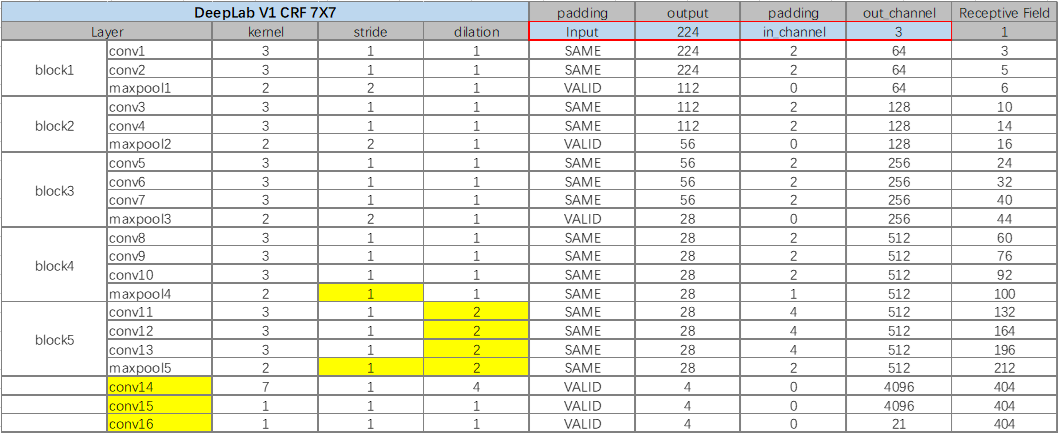
去除降采样:将 pool4 和 pool5 层的 stride 由 2 改为 1,使得 VGG16 网络总的 stride 由原来的 32 变成 8。
- 引入空洞卷积:保证感受野不变
- pool4 stride 改变,后面的层感受野都会随之改变;
- conv5_1,conv5_2,conv5_3,pool5 膨胀系数由 1 改为 2;
- conv14 即 由第一个全连接层改的卷积层,膨胀系数由 1 改为 4;
-
将最后一层的类别 1000 的分类器替换为类别 21 的一个,损失函数是卷积 output map 上每个空间位置交叉熵的求和;
- 提升训练速度:
-
减小kernel:第一个全连接层会有 4096 个大小为 7x7 的 filters,这大大增加了计算的难度。该文减少第一个全连接层 filter 的空间尺寸(3x3),但也相对应的减少了网络的感受野,减少了 2 到 3 倍的计算时间。
-
减少channel:把 FC6 输出的 feature map 从 4096 减少到 1024
该文首先利用 DCNN 的识别能力,后接全连接的 CRF 来提高位置的准确性,通常,CRF 包含相邻节点的能量项,有利于将相同的标签分配到空间上相近的像素。本质上,short-range CRF 的作用是清除由基于局部手工设计分类器产生的错误预测。相比弱分类器,DCNN 得到的 score maps 更加平滑,此时,再使用 short-range CRF可能是有害的,因为目的不是为了平滑边界而是回复局部细节,因为经过 DCNN 后已经很平滑了。为了解决 short-range CRF 的弊端,引入了全连接CRF。
3. 实验 & 测试
- 在 ImageNet 上预训练的VGG16权重上做 finetune
- CRF 是后期处理,不参与训练
- 测试时,对特征提取后得到的 feature map 进行双线性插值,恢复到原图尺寸,然后再进行 CRF 处理。
六、DeepLab V2
1. 关键技术
- dilation convolution
- ASPP
- CRF
- poly
2. 网络结构
本文对 VGG16,ResNe-101 进行改进:
- 将全连接层变为卷积层;
- 将DCNN最后几个maxpooling去掉;
- 在后续的卷积层中添加更高 sample rate 的空洞卷积,增加特征图的分辨率;
- 对一张图片平行的使用不同 sample rate 的空洞卷积层(ASPP),增强感受野;
- 应用双线性插值将 score map 还原为原图大小;
- 全连接的 CRF,改善模型对边界的分割;
虽然CRF作为后处理的手段,但该文将CRF的 mean-filed 推理步骤进行转化,并添加到end-to-end可训练的前向网络中。
DeepLab v2 相比 DeepLab v1 的改进:对多尺寸的图片分割效果更好,引入 ASPP,用 ResNet 作为 backbone,实现比 VGG16 更好的效果。
3. ASPP
为了解决分割中的多尺寸问题,该文实验了两种方法:
-
采用传统的方法,在训练和测试时,从 DCNN 中抽取多层(这里使三层)feature map,通过双线性插值恢复为原图尺寸,然后将其进行融合,这么做确实有效果,但是增加了DCNN的计算量。
-
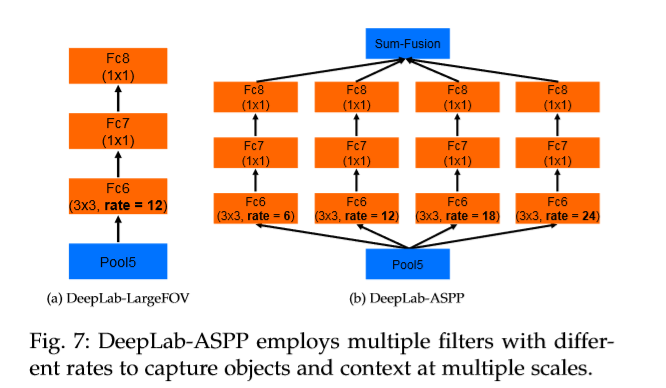
对一张图片上通过平行的进行不同尺寸的空洞卷积操作,间接的得到多尺度特性,不同 sample rate 提取的特征经过单独的后处理和融合进而生成最终的结果。采用的即 ASPP 模型,如下图。
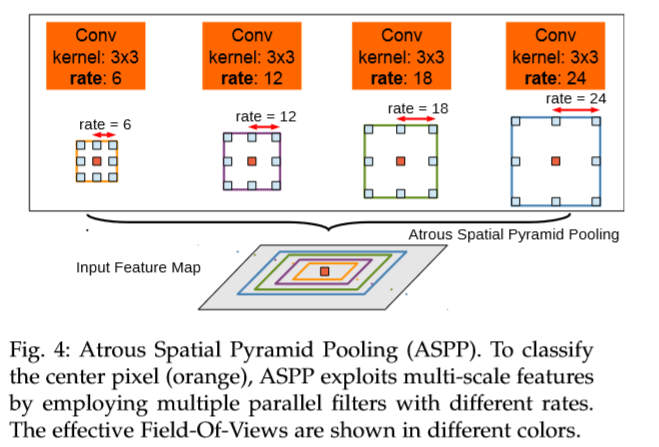
ASPP 各个空洞卷积分支采样后结果最后融合到一起(通道相同,做像素加)。
4. 实验 & 测试
将 VGG-16 和 ResNet-101 处理成分割网络。损失函数是 CNN 输出 feature map(缩小为8倍)后空间位置交叉熵的和,使用 SGD 优化算法,在 PASCAL VOC 2012, PASCAL-Context, PASCALPerson-Part,和 Cityscapes 上进行实验。
实验上的改进:
- 训练时不同的学习策略。
- ASPP
- 加深网络和多尺度处理
- 使用 poly 学习速率
- 调整 ASPP 中的rate: r={2,4,8,12} r={6,12,18,24}
- 将 VGG-16 换为 ResNet-101 使网络加深
七、DeepLab V3
1. 关键技术
- dilation convolution
- 新ASPP
- poly
2. 网络结构
2.1 级联结构
作者首先以串联方式设计 artous convolution 模块。在 ResNet 的最后一个模块叫做 block4,在 block4 后复制 block4 3 次得到 block5,block6,block7,使网络加深进而可以获得更长距离的语义信息。但网络层数加深使物体的细节信息就会有损失,所以这里引入了空洞卷积。
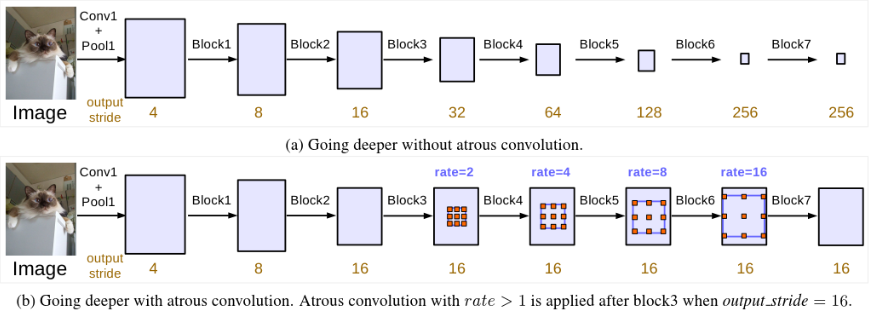
- output_stride:图像从原始分辨率到最终分辨率降低的倍数;
- 每个 block 中都包含 3 个 3×3 的卷积,除了在最后一个 block stride 为 1,剩余 block stride 都为2;
- Multi_Grid = {r1, r2, r3} 为 block4~block7 的三个 convolutional layers 的 unit rates;
- rate 的最终大小等于 Multi_Grid 与相应 rate 值的乘积。例如,当 output_stride = 16, Multi_Grid = (1,2,4) 时,block4 中 three convolutions 的 rate 分别为:rates = 2 ∗ (1, 2, 4) = (2, 4, 8);
2.2 平行结构
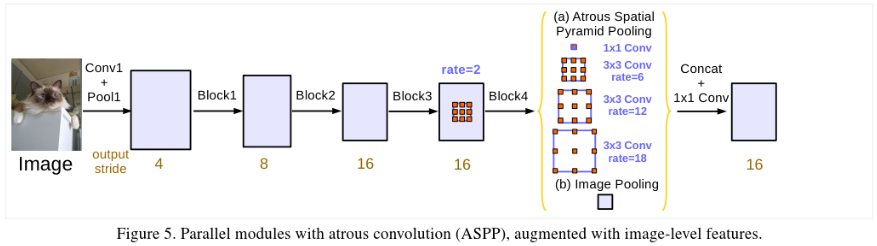
ASPP的改进:
- 无 CRF
- 增加 BN 层:加速训练;
- 增加 1x1 conv;
- 增加 global avg pool:克服远距离下有效权重减少的问题且整合全局上下文信息;
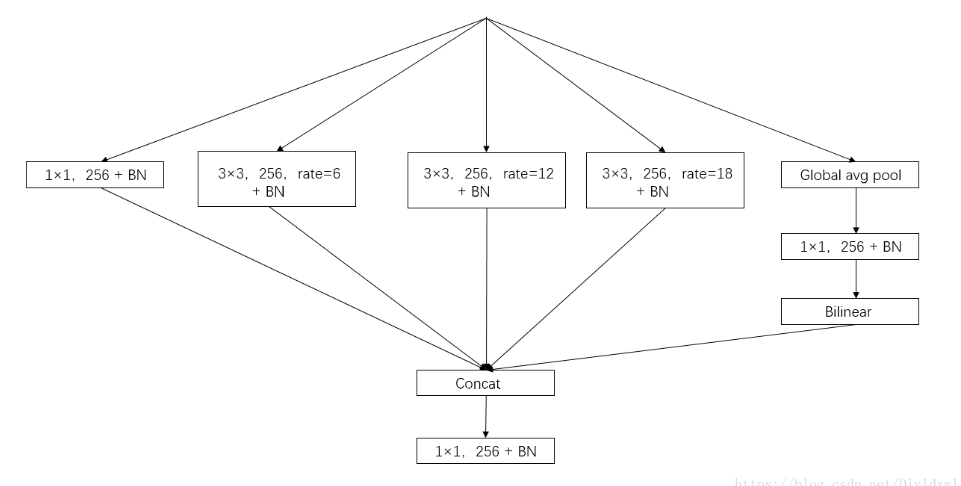
新 ASPP 的组成(output_stride=16):
- 一个 1×1 卷积和 3 个 3×3 的空洞卷积(采样率为(6, 12, 18)),每个卷积核都有 256 个且都有 BN 层
- 图像级特征(即全局平均池化)
将所有得到的 feature map 送到,1x1x256 的卷积层中,后接 BN 层,并通过双线性插值上采样到理想分辨率。最后将所有分支得到的 feature map 进行拼接,然后送到 1x1 的卷积(自带 BN)中,最后还有一个 1x1 的卷积来产生最后的 logits。
两种方法的结构合并并不会带来提升,相比较来说,ASPP 的纵式结构要好一点。所以 deeplab v3 一般也是指 ASPP 的结构。
3. 实验 & 测试
- 学习率的更新策略和 deeplabV2 相同 —— poly;
- 裁剪:使空洞卷积的 rate 尽可能的有效,crop 的大小裁剪为 513;
- Batch Normalization;
- 数据增强 —— 随机左右翻转、随机缩放;
- Upsampling logits 保证 groundtruth 的完整性,将输出上采样 8 倍与完整的 ground Truth 进行比较;
八、DeepLab V3+
1. 关键技术
- decode module
- modify xception
- dilation convolution
- 新ASPP
- poly
2. 网络结构
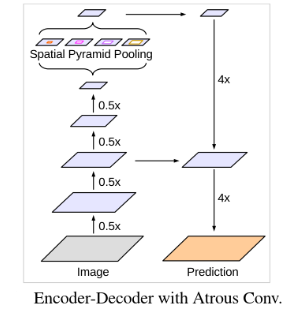
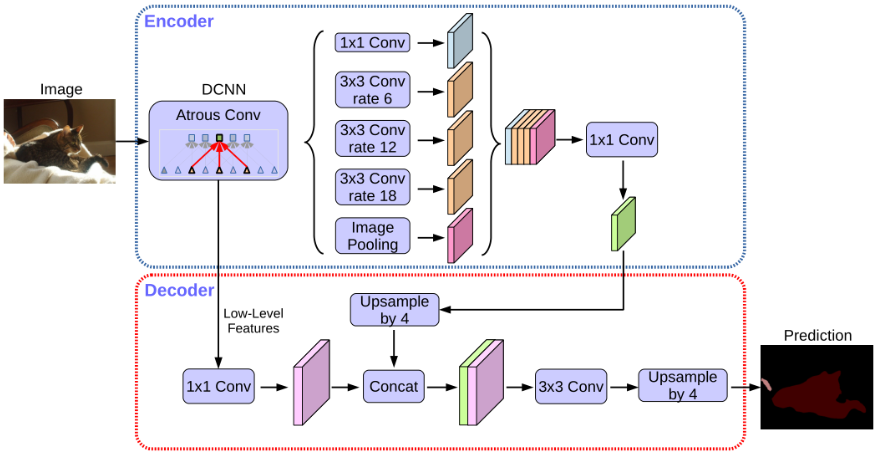
在 DeepLab V3+ 中采用了 encoder-decoder 结构,在 DeepLab V3 中加入了一个简单有效的 decoder 模块来改善物体边缘的分割结果:先上采样4倍,在与encoder中的特征图 concatenate,最后在上采样 4 倍恢复到原始图像大小。除此之外还尝试使用 Xception 作为 encoder,在 ASPP 和 decoder 中应用 depth-wise separable convolution 得到了更快精度更高的网络。
2.1 Encoder
encoder 就是 DeepLab V3,通过修改 ResNet101 最后两(一)个 block 的 stride,使得 output stride 为 8(16)。之后在 block4 后应用改进后的 ASPP,将所得的特征图 concatenate 用 1×1 的卷积得到 256 个通道的特征图。
2.2 Decoder
在 decoder 中,特征图首先上采样 4 倍,然后与 encoder 中对应分辨率低级特征 concatenate。在 concatenate 之前,由于低级特征图的通道数通常太多(256或512),而从 encoder 中得到的富含语义信息的特征图通道数只有 256,这样会淡化语义信息,因此在 concatenate 之前,需要将低级特征图通过 1×1 的卷积减少通道数。在 concatenate 之后用 3×3 的卷积改善特征,最后上采样 4 倍恢复到原始图像大小。
- 1×1 卷积的通道数为 48;
- 2 个 3×3 的卷积来获得更锋利的边界的 3×3 的卷积;
- 只使用 conv2 的低级特征;
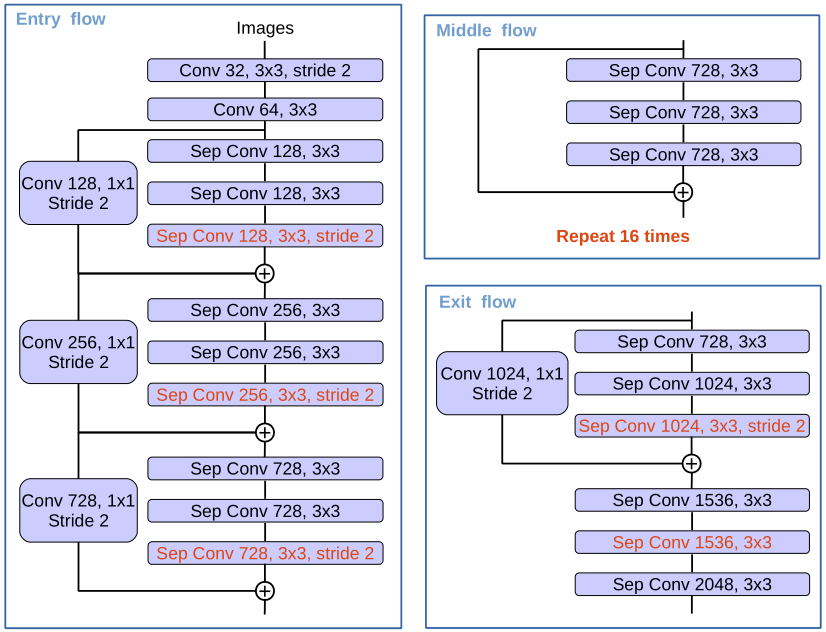
2.3 将 Xception 作为 Encoder
使用深度可分离卷积可极大的减少计算量,原始的 Xception 结构如下:
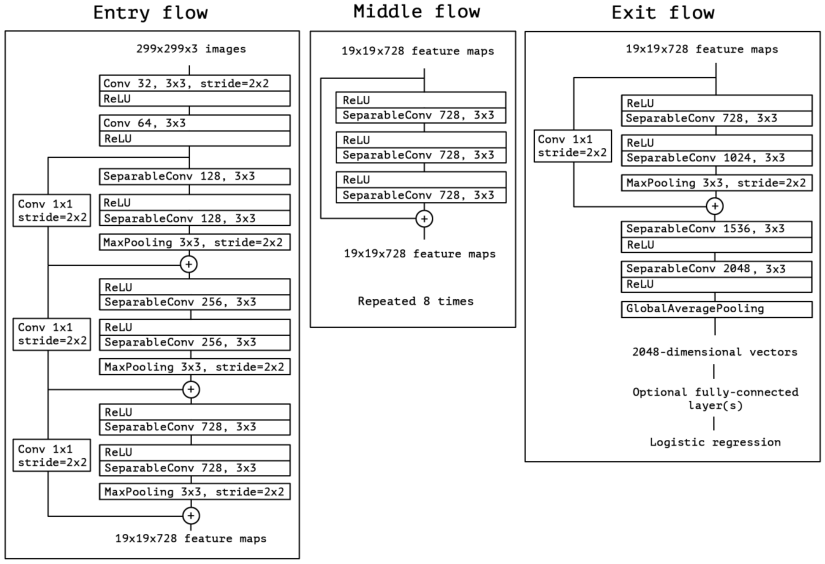
采用的 Xception 模型为 MSRA team 提出的改进的Xception,叫做 Aligned Xception,并做了几点修改:
- Middle flow 由重复 8 次改为了 16 次,增加了网络深度;
- 所有的 max pooling 操作替换成带 stride 的 separable convolution,这能使得对任意分辨率的图像应用 atrous separable convolution 提取特征;
- 在每个 3×3 的 depath-wise convolution 后增加 BN 层和 ReLU;
3. 实验 & 测试
- learning rate policy: “poly”
- learning rate: 0.007
- crop size: 513x513
- output_stride = 16
- random scale data augmentation